Prosthetic Foot Design
2016-2018

As part of my PhD project, I developed a simulation based prosthetic foot design framework that creates customized passive prostheses to enable users to best replicate natural walking motions.
This framework was used to create affordable, high-performant, mass-manufacturable prostheses for emerging markets' users that were field piloted in India in 2017 and 2018. These field pilot were conducted along a successful clinical study showing that our plastic, energy storage and return (ESR), optimized feet performed as well as conventional carbon fiber ESR feet for less than one twentieth of the costs and development time.
This work was funded by the MIT Tata center and the US department of defense orthotics & prosthetics outcomes research program. It was presented at the International Society of Prosthetics and Orthotics (ISPO) in 2019. More details can be found below, on the GEAR Lab's webiste and in the following papers.
Contributions
Human Centered Design
Structual and Biomechanics Models
Compliant Mechanism Design
Shape and Size Optimization
Clinical and Field Studies
Collaborations
Kathryn Olesnavage
Awards
MIT Thomas Sheridan Prize for Excellence in Human Machine Interaction Research (2019)
Patent No. US2020/0375763A1
The need for affordable, high performant feet
More than 80% of the lower limb amputee population live in low and middle income countries accounting for more than 30 million people. Only 10% have access to prosthetic devices but most emerging markets' amputee use inadequate limbs that require significantly more effort to walk, exhibit unnatural walking motions and are subject to social stigmas preventing them from employment and independent living. There is a gap between the high performance prosthetic feet in the United States that cost thousands of dollars and the affordable prostheses available in the low and middle income that lack quality, durability, and performance.
Bhagwan Mahaveer Viklang Sahayata Samiti (BMVSS), one of the largest distributor of these affordable prosthetic feet, started a collaboration with us, at the Global Engineering and Research Lab at MIT, to design an updated version of their Jaipur Foot. The original Jaipur Foot’s success was due to its lifelike look, flexibility, low-cost of $10 and extreme durability. The goal of this project was to create a foot that would be much lighter, can be mass-manufactured, meets international testing standards, is compatible with other prosthetic equipment, and matches the durability of the current foot.

High-end carbon prosthesis (Variflex, Ossur)

Affordable wood and rubber foot (Jaipur Foot)
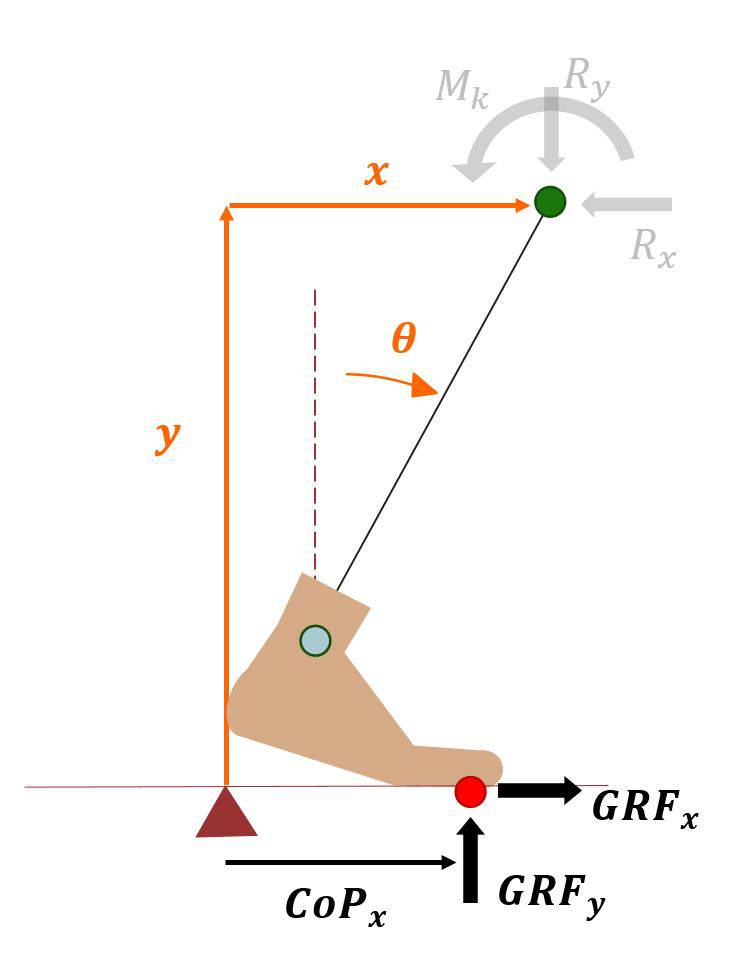
Free-body diagram of the prosthetic foot and lower leg during a step
A novel metric, the Lower Leg Trajectory Error (LLTE) maps the foot design to the user walking performance
Through our partnered NGO in India, we conducted extensive user and stakeholder interviews as well as multiple prototype testing to understand the user’s perception and walking pattern on prosthetic limbs as well aslocal manufacturing, cultural and distribution constraints. This information enabled us to develop a novel design metric called the lower leg trajectory error (LLTE).
The LLTE value predicts the performance of any given passive prosthetic foot design before building it by combining structural and biomechanical analyses of the amputee's lower leg. The LLTE value evaluates how closely a prosthetic foot can enable the user to replicate a target walking pattern. Namely, it compares the prosthetic side predicted lower leg trajectory during a step to a reference set of target lower leg motion when the prosthetic foot is subject to reference walking loads. The LLTE value is a single value score that provides a quantitative understanding of how the mechanical design of the passive prosthetic foot affects the user’s walking pattern gait.
Prosthetic foot design framework based on the LLTE and structural optimization to replicate natural walking motion
For a given prosthetic user, the LLTE framework optimizes the shape and size of a parametric foot model to minimize the LLTE value (performance score). This results in an LLTE optimal prosthetic foot design that enables this user to most closely replicate a target walking pattern.
The LLTE framework can be used with any parametric foot model, as long as a structural constitutive model can accurately describe its mechanical behavior. Here, we use wide Bezier curves to parametrize a 2D ESR single part compliant prosthetic foot. This parametrization was chosen over traditional topology optimization techniques for its simplicity and ease of manufacturing. A custom finite element model based on beam-elements written in MATLAB was used to describe its structural behavior. The constitutive structural model is used to predict how a given prosthetic foot deforms under walking loads, calculate the anticipated prosthetic lower leg trajectory and the corresponding LLTE score. From this structural model, stress levels within the foot during a step can be calculated and used in the optimization as constraints to ensure that the device will not fail under load. This analysis enables the creation of robust prosthetic feet that enable natural walking patterns.
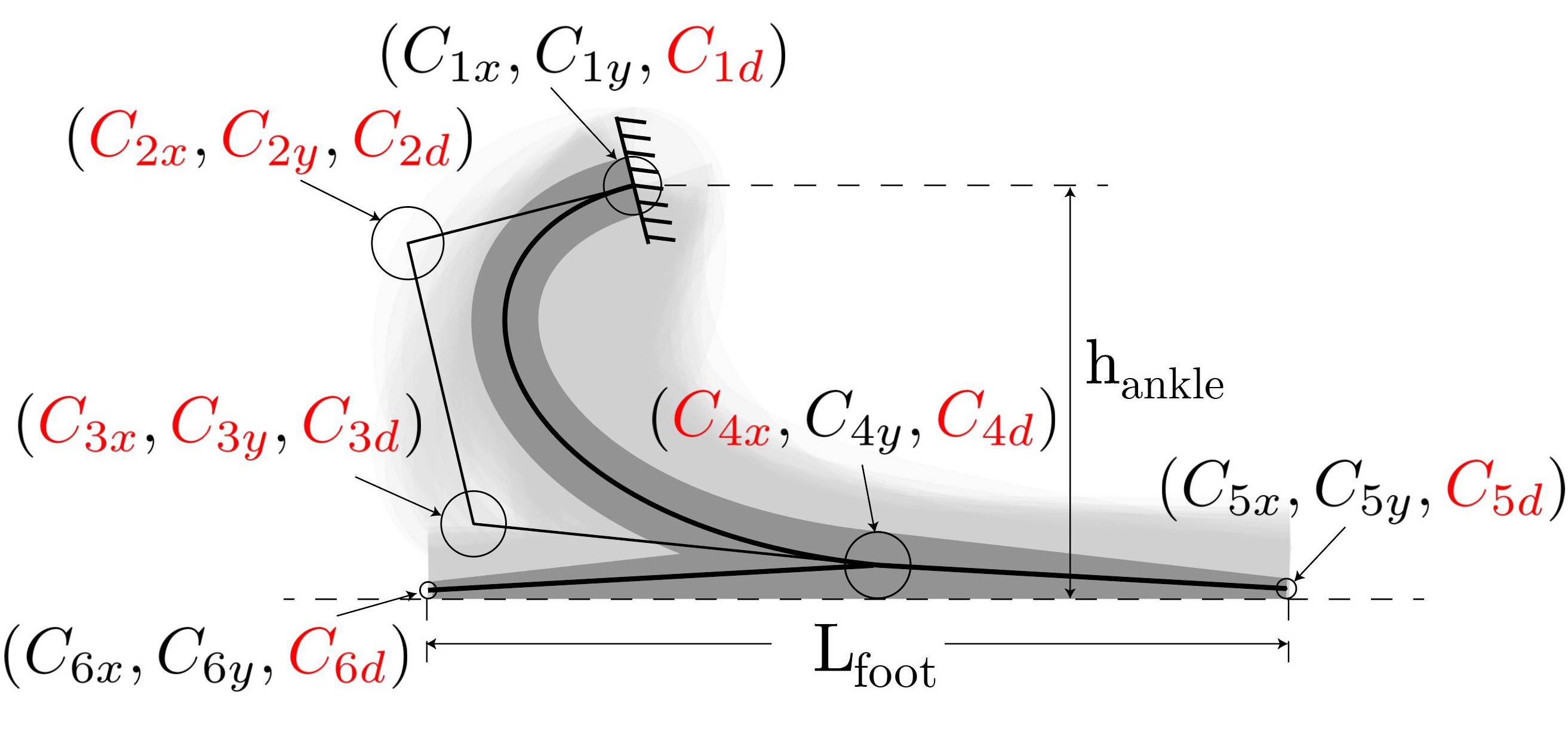
Prosthetic foot parametric model overlaid on the design space
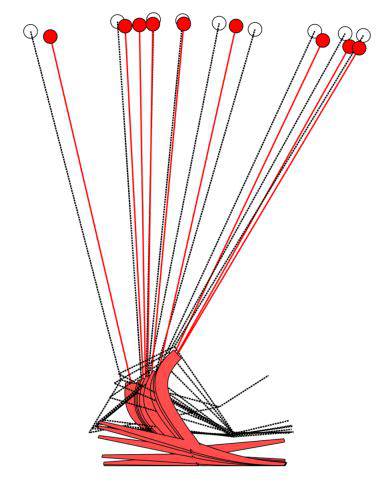
Predicted lower leg trajectory in red overlaid on the target trajectory in black

Motion lab gait testing and field testing
of LLTE prosthetic foot prototypes
High performance, low-cost prototypes manufacturing, validation and testing
A set of user-specific prosthetic feet made out of Nylon 6/6 were designed using the LLTE framework to replicated able-body flat ground walking pattern. Nylon 6/6 was chosen as it has high strain energy density characterisitics, is easy to manufacture, low viscous dissipation and is low-cost. These prototype ESR prosthetic feet have a material cost in the order of tens of dollars.
These LLTE optimal prosthetic feet prototypes were tested and validated in a motion lab and in the field with below-knee prosthetic users. Through gait testing, the LLTE prosthetic feet enabled closer replication of the target walking motion and loading, increased energy storage and return, and higher user preference scores than control carbon fiber feet. In addition, extensive user testing in India suggested that the LLTE prosthetic feet increased the walking speed of users and reduced walking effort.

User interviews and testing at BMVSS in India

Cross section of the Jaipur Foot prosthesis distributed by BMVSS
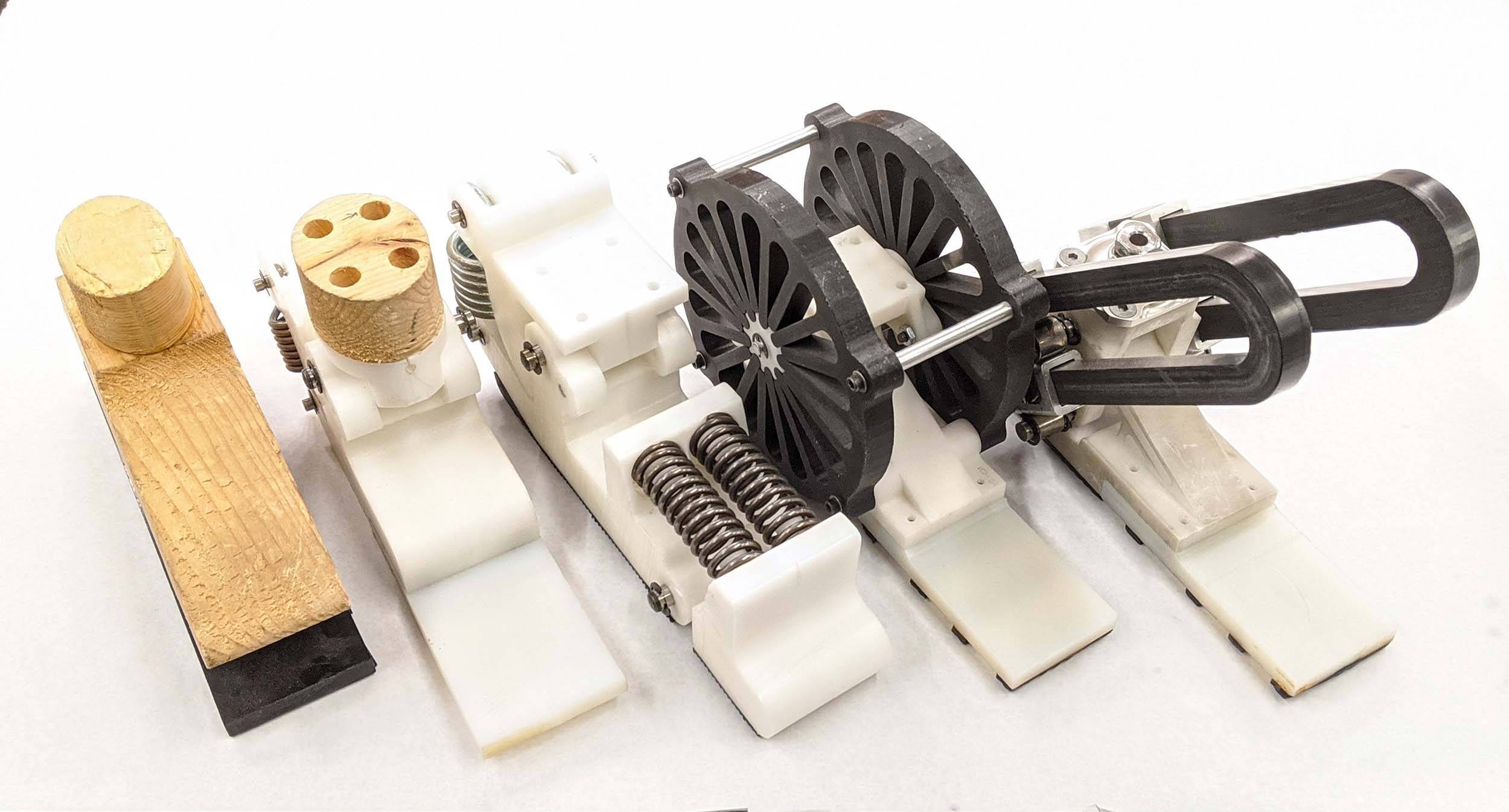
Early proof of concept prototypes to validate theory

User testing of LLTE proof of concept prototypes in India

Example of a LLTE-optimal single part ESR prosthetic foot

Manufacturing of prototype prosthetic feet using waterjet

Pseudo-prosthetic boot testing to ensure safety & functionality
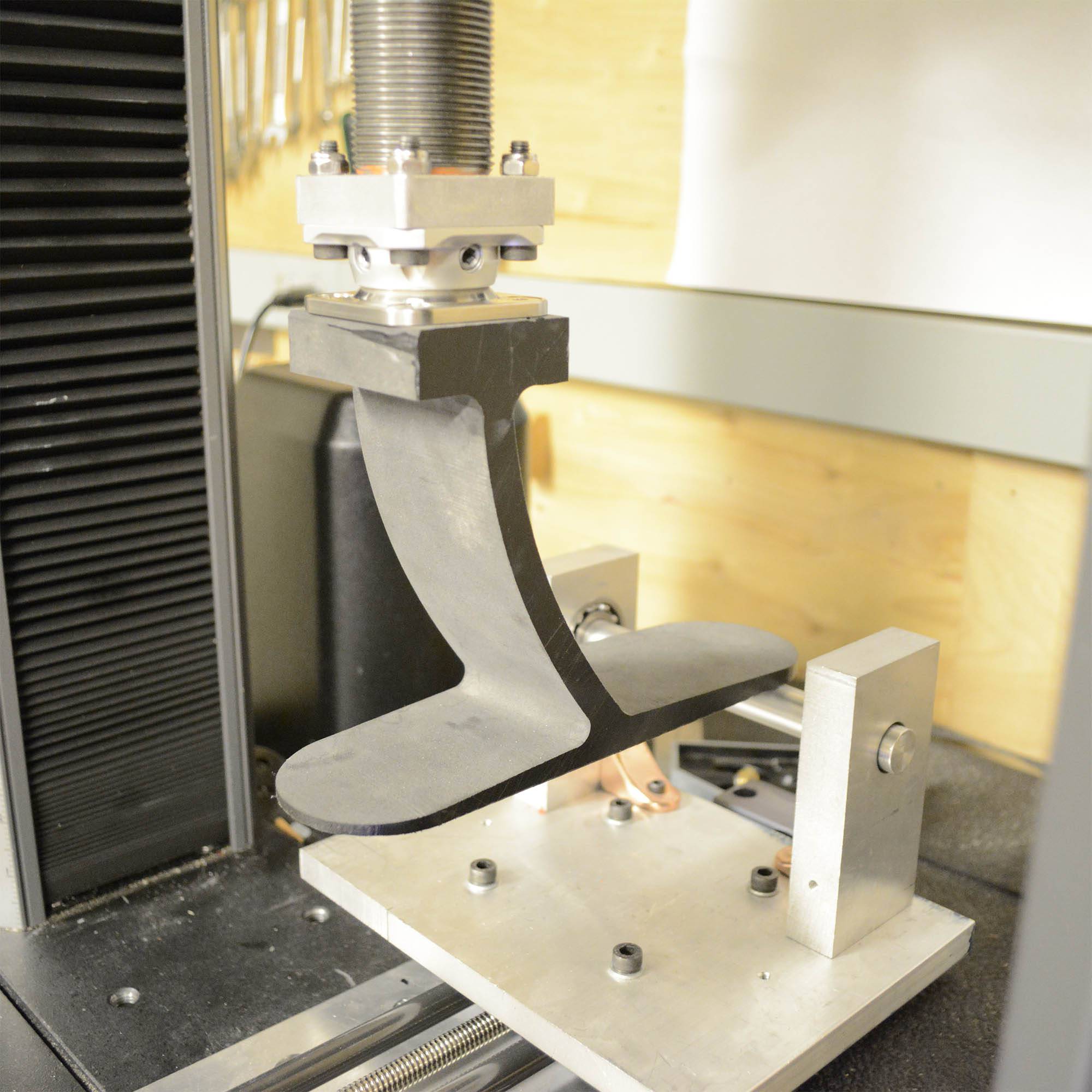
In-lab mechanical testing to ensure safety requirements

Motion lab gait testing at Northwestern University

Pilot testing with below knee amputees at BMVSS, India

Field testing with below knee amputees at BMVSS, India

Field testing with below knee amputees at BMVSS, India