Applied Machine Learning
January - May 2019
Leveraging machine learning technics, I developed an automated and flexible design framework to customize affordable high performance passive prosthetic feet that enable users to replicate close to natural walking motions. Using structural optimization and biomechanical models, I applied variable reduction techniques to select the most appropriate design space parameters, clustering algorithms to provide designers a set of diverse optimal prosthetic foot design options and combined surrogate models with sampling techniques to generate and evaluate prosthetic feet in high performance regions of the design space.
CONTRIBUTIONS
Dimensionality Reduction
Design Clustering
Bayesian Optimization
Design Variable Reduction Using PCA
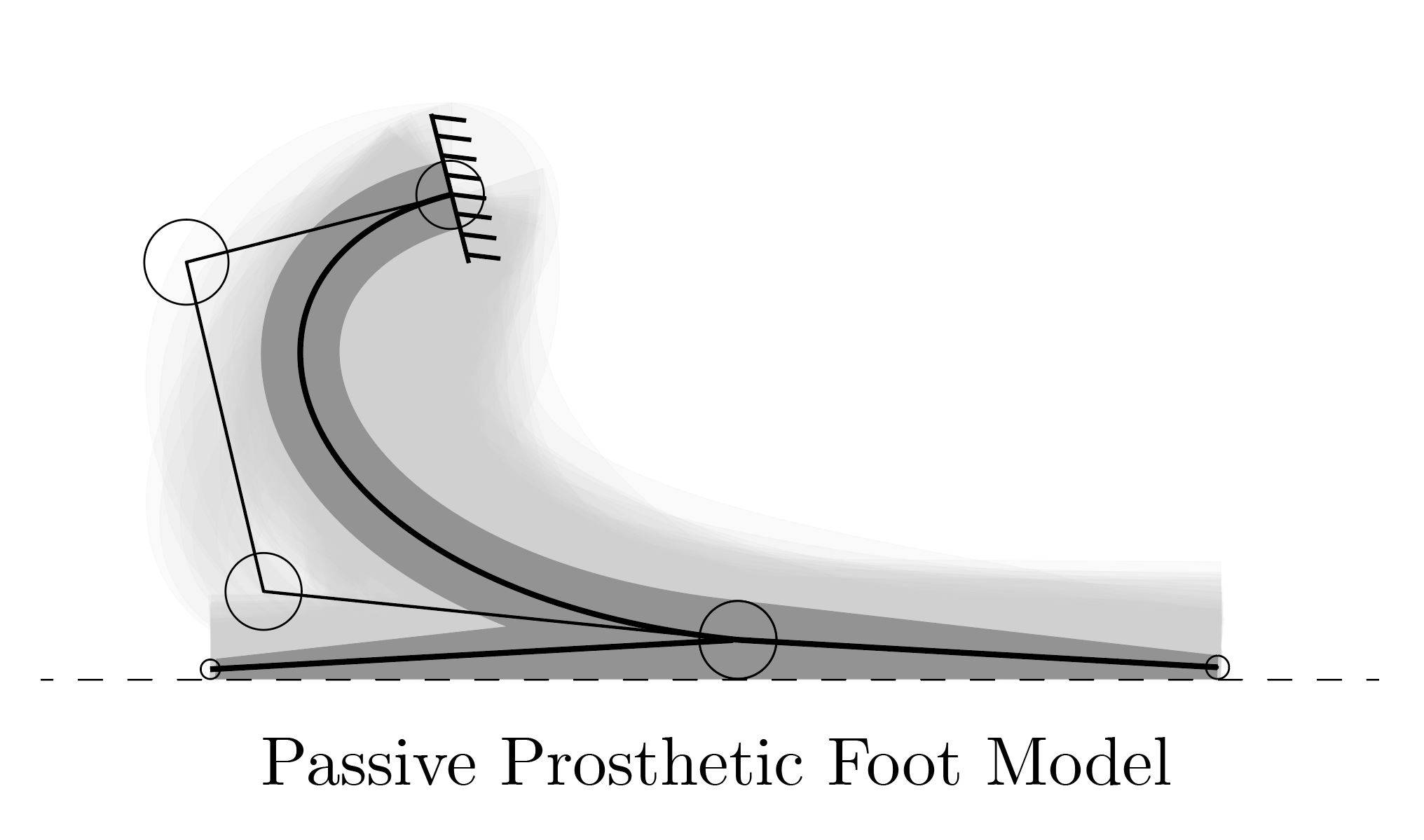
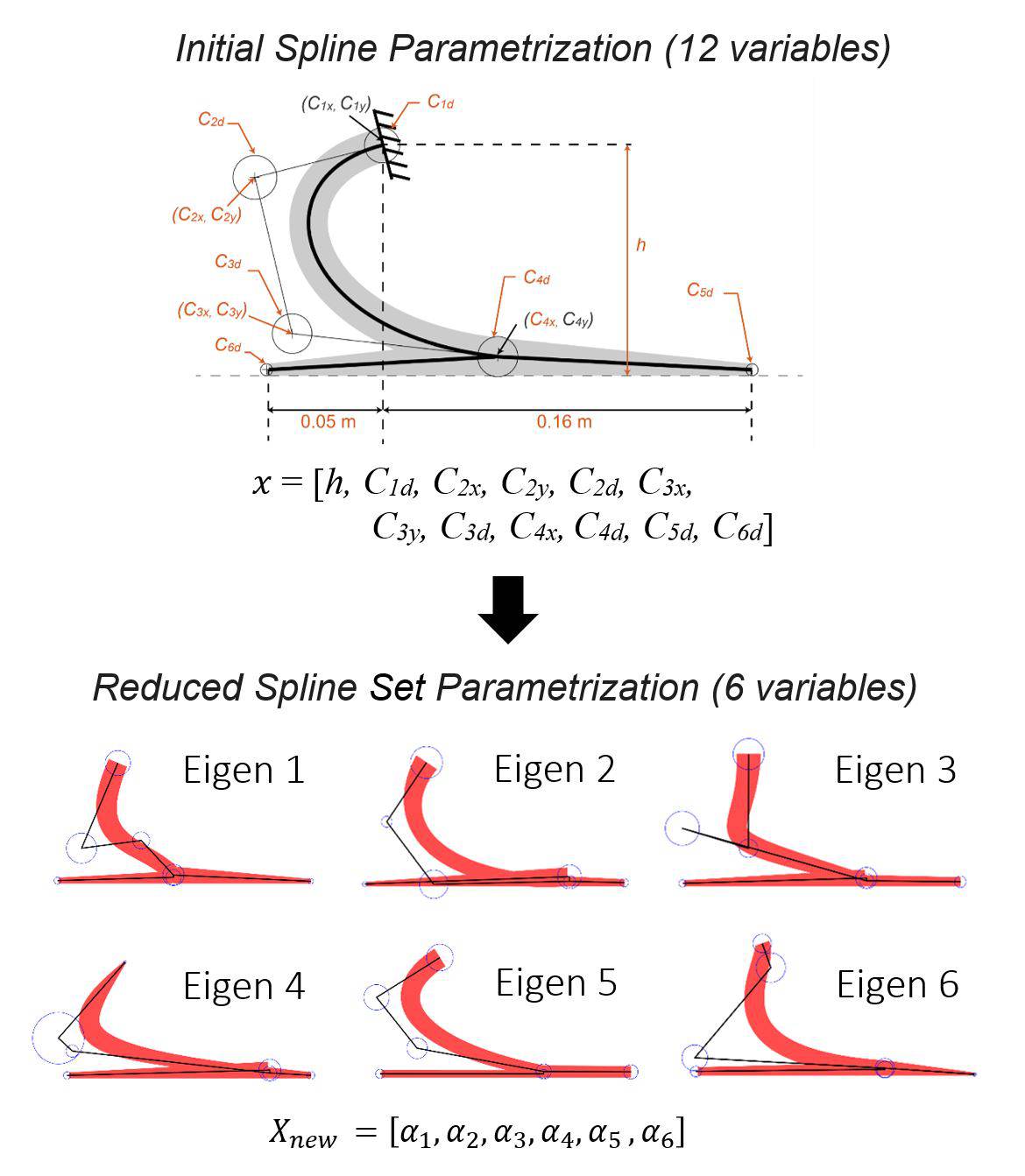
Design frameworks for prosthetic feet are usually based on parametric models with a multitude of design parameters. These high dimensional design spaces are inefficient and ill-defined with a majority of the designs being non-physical or poor performing. This makes the design process for a prosthetic foot slow with no guarantee of high performance, preventing these frameworks to be used responsively. Recent work on design variable transformation using principal component analysis (PCA) by Yonekura (2014) and Brown (2019) enabled design space dimensionality reduction that discard ill-defined designs and improve the design process.
I used PCA to reduce the number of design variables for this prosthetic foot model from 12 to 6 while keeping 79.8% of the variance in high-performance design space regions. This reduction of parameters describing a prosthetic foot enabled a 5.4 time reduction in optimization time while achieving 94% of the optimal performance score. The process followed for this work was:
High Performance Design Clustering
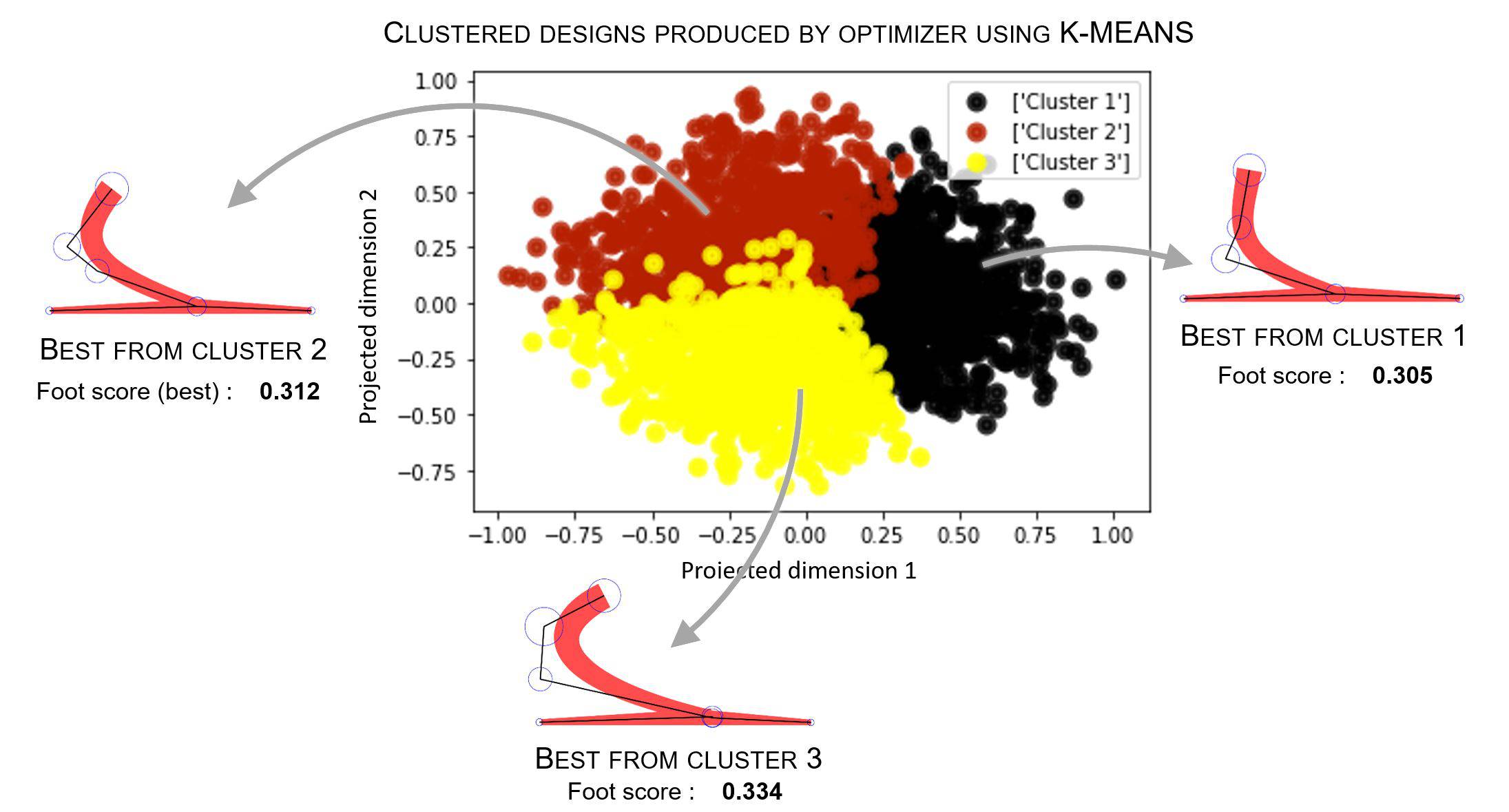
To allow for more flexibility in the design process, K-means clustering techniques were used to analyze the large amount of designs evaluated by the optimizer during the optimization process. Thus providing the designer with not only one optimal design but a set of high performing designs with distinct features.
K-means clustering algorithms were ran with different target cluster sizes. Using the elbow method, 3 clusters were chosen to best describe the library/variety of prosthetic feet designs and the most performant design was selected from each cluster. These 3 designs displayed different geometries with similar performance scores.
Bayesian Optimization
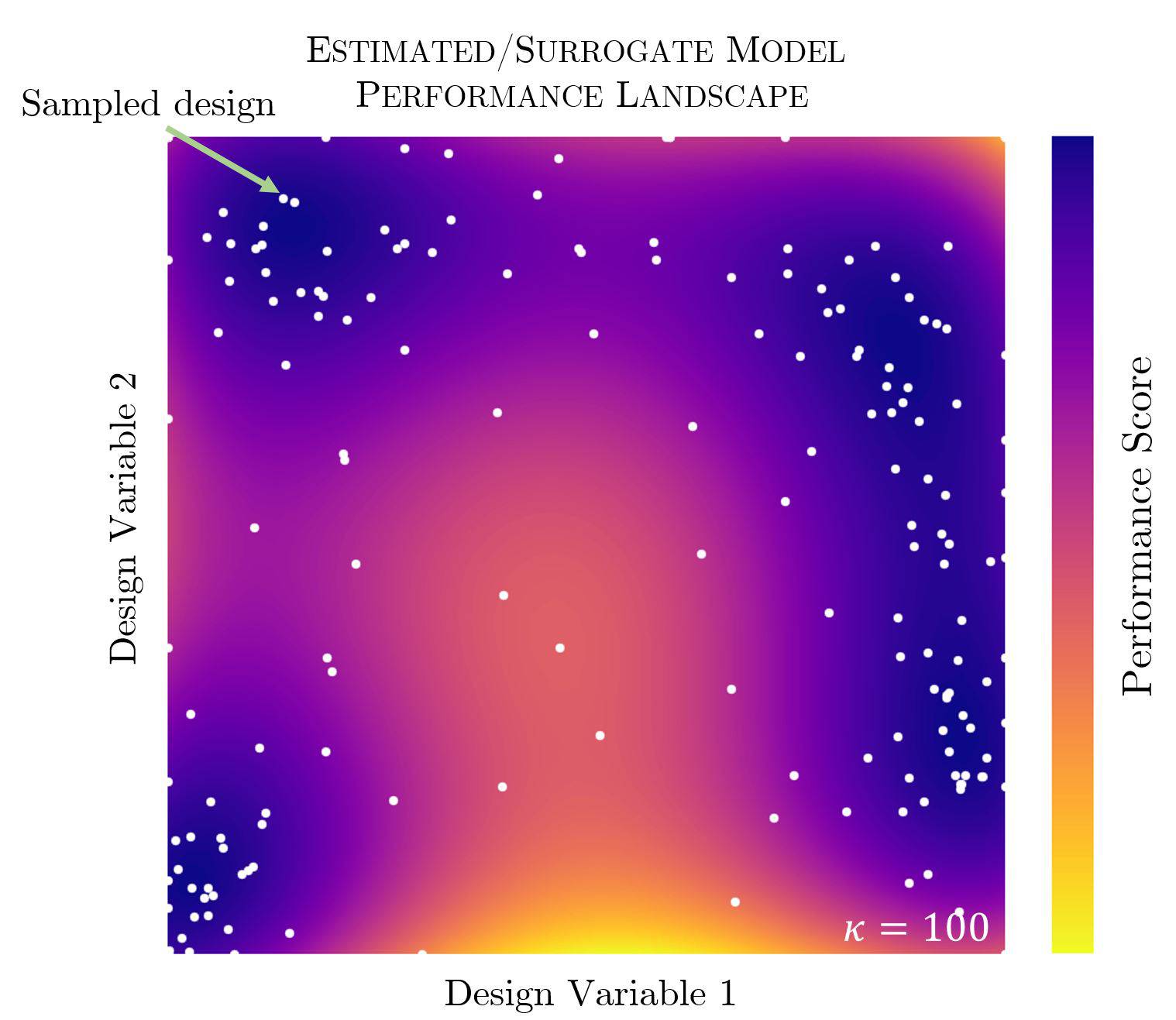
As an alternative to the traditional evolutionary algorithm for optimization schemes, a Bayesian optimizer that combines surrogate modelling estimates along with efficient sampling techniques was used to select high-performance prosthetic feet. A Bayesian optimizer builds/updates an estimate of the performance landscape of the design space for each design that is sampled and evaluated by the algorithm. Using that performance landscape estimate, it is then able to efficiently sample the next design in high-performance regions of the design space.
After training the surrogate model using bayesian optimization techniques, the performance landscape estimate enabled the algorithm to sample 28% more high-performance designs than the evolutionary algorithm.